
�D�n�\��
���t�ļ� �P�ɥ[�� ��X�i�� �з�/�ۦ�
/�s�N���� /�g������
RS485�q�T ���ѱM�~�n�� �q�LPC
(Modbus RTU) �]�w�Ѽ�
�DNEW �}�e: AC/DC�C�q�����]TK4N�����~�^
�D50 ms�����t�ļ˲v�M��0.3�H����ܺ��
�D���G��LED��ܿù��A�㦳���j��PV�MSV�r��
�D�P�ɥ[���M�N�o����\��
�D�۰�/��ʱ���ﶵ
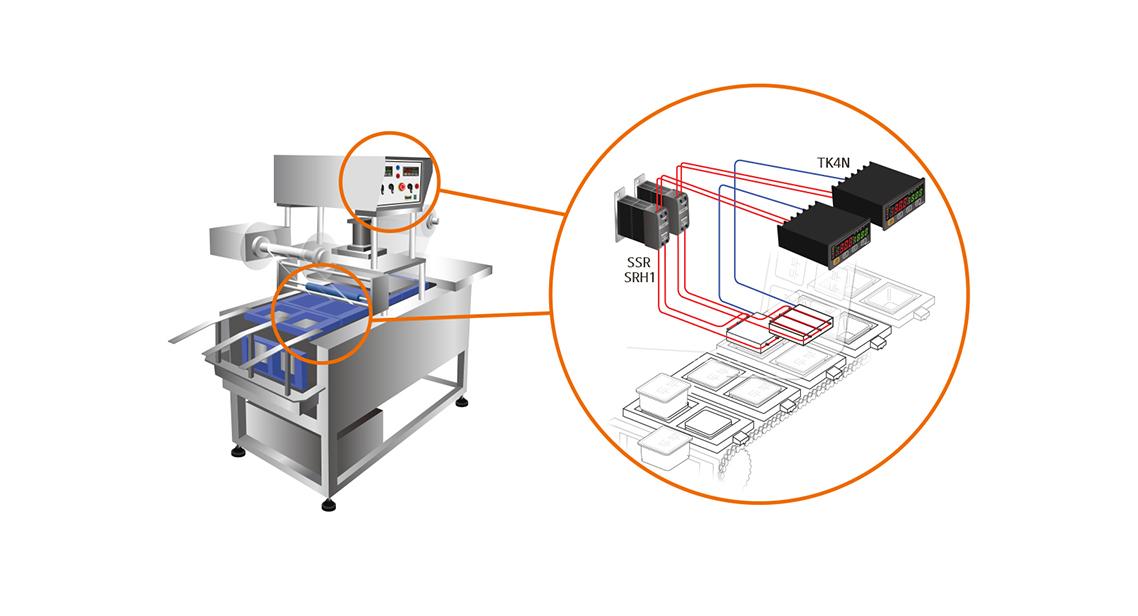
�DSSR�X�ʿ�X/�q�y��X�i��
�DSSR�X�ʿ�X(SSRP�\��)����ﶵ�G�з�/�ۦ�/�g������
�D����q�T�GRS485 (Modbus RTU)
�D�q�LPC�i��ѼƳ]�w�]RS485�q�T�^
- �]�tDAQMaster�n��]�������]�ƺz�n��^
- �q�T�ഫ���t��: SCM-US(USB��serial�ഫ��), SCM-38I(RS-232C��RS485�ഫ��), SCM-US48I(USB��RS485�ഫ���^
�D�K�Q���Ѽƥ\��
- �ѼƱ��X�G���ä����n�Ϋܤ֨ϥΪ��Ѽ�
- �Τ�ѼƲաG�զX�`�ΰѼơA�K��X�ݩM�t�m
�D�h�ؿ�J�����M�ūd��
�D�[�����_�}��ĵ�\��]CT��J�^
- �q�y���P���]CT�^��W�X��: CSTC-E80LN, CSTC-E200LN
�D�h�qSV�]�w�]�̤j4�q�^�\��]�q�LDI�ݤl��ܡ^
�D�h��DIN�ؤo�i�ѿ��: (48 x 24, 48 x 48, 72 x 72, 96 x 48, 48 x 96, 96 x 96 mm)
�D�ݫO�@�\��W�X��: R◻A-COVER (TK4N�ATK4SP�������~)
50 ms���t�ļ�
50 ms���ױļ˳t�v�i�H�b�ݭn�ֳt�T���t�ת����Τ���{��T���ūױ���C

�[�� & �s�N�P�ɱ���
����i�H�P�ɱ���[���M�s�N����A���Ѧ��Ī��ūױ���C

�q�y��X�MSSR�X�ʿ�X���
�Τ�i�q�L�����ѼƳ]�w�A��ܻݭn���q�y��X��SSR�X�ʿ�X�C

SSR �X�ʿ�X�覡�i��(SSRP �\��)
�Τ�i���SSR�X�ʿ�X�����з�ON/OFF ����, �g������M�ۦ챱��A��{�g�ٲz�Q���ūױ���C

�K��ϥΪ��Ѽưt�m
�Ѽưt�m��²��A�K��ϥΡA�]�t�Ѽ����å\��ΥΤ�ѼƲե\��C

�Ѽ����å\��
���ä@�Ǥ��`�ΥH�Τ����n���ѼơC

�Τ�ѼƲճ]�w�\��
�N�`�ΰѼƤ��եH�K��d�ݩM�]�w�C
�ݤl�O�@�\(TK4N)
TK4N�����㦳�ݤl�O�@�\�A�i����IJ�q�M�u���C

��X�]�ƺz�{��(DAQMaster)
DAQMaster�O�������]�ƺz�{���A�Ω�]�w�ѼƩM�z�ʱ��ƾڡC
�ФU���Τ��U�M�������]�ƺz�{���C
�p����t�m
|
���� |
�̧C�t�m |
|
�B�z�� |
�ĥ�Intel Pentium���ΥH�W������IBM PC�ݮe�p��� |
|
�ާ@�t统 |
Microsoft Windows 98/NT/XP/Vista/7/8/10 |
|
�e�q |
256MB+ |
|
�w�� |
1GB+�i�εw�ЪŶ� |
|
VGA |
����v: 1024��768 �H�W |
|
��L |
RS-232���ݤf(9�w), USB�ݤf |
DAQMaster �ɭ�

����
  
�u�~���~�ͩվ� �]�˶�R�A�ʤf�M���_ ���˽c�ʤf��
�e���ʤf�� �����s�y�M�]�˹L�{
|
![�I�Q��-�O�q�۰ʤƬ�ަ������q:�M�~�P����.�o�i�����۰ʤƬ�ެ����]��](http://redmedia018.so-buy.com/ezfiles/redmedia018/img/pictures/banner%202019.jpg)



